In the rapidly evolving world of logistics, unmanned aerial vehicles (UAVs) are becoming increasingly vital for efficient cargo transportation. However, the complex challenges of multi-objective optimization in this field have long been a stumbling block. Enter Jian Deng, a researcher from the College of Civil Aviation at Nanjing University of Aeronautics & Astronautics, who has introduced a groundbreaking solution that could revolutionize the way UAVs navigate and optimize their routes.
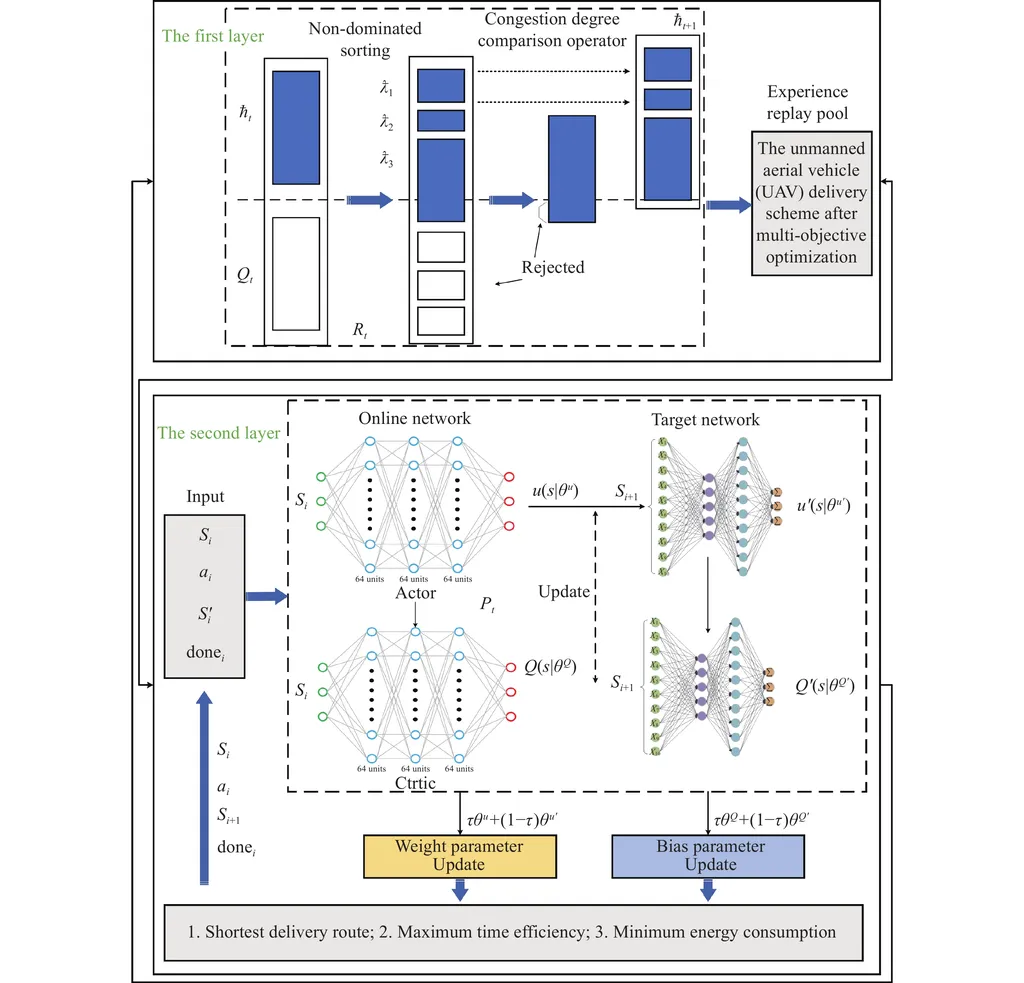
Deng’s innovative algorithmic framework, known as MODDPG–NSGA2, is a dual-layer architecture designed to address key issues such as minimizing path length, maximizing time compliance rates, reducing energy consumption, and adhering to multiple constraints. “The traditional nondominated sorting genetic algorithm II (NSGA2) has a critical limitation—its inability to dynamically adapt to environmental changes,” explains Deng. “Our framework overcomes this by integrating a closed-loop system that includes perception, constraint handling, and real-time strategy adjustment.”
The upper layer of the MODDPG–NSGA2 architecture leverages an enhanced version of the NSGA2 algorithm, constructing a robust multi-objective optimization model. This results in a global initial Pareto optimal solution set that considers objectives such as minimizing path length, maximizing time achievement rates, and reducing energy consumption. The lower layer, meanwhile, employs the MODDPG algorithm to adapt to dynamic environments, continuously sensing and processing real-time information to make informed decisions on path adjustments.
The synergy between these two layers creates a deep, interactive, and collaborative mechanism that addresses common pitfalls in optimization problems, such as global imbalance and local myopia. “By integrating both global and local perspectives, MODDPG-NSGA2 achieves a more holistic and adaptive approach to multi-objective optimization,” says Deng.
The experimental results speak for themselves. Compared with the traditional NSGA2 algorithm, MODDPG–NSGA2 demonstrates a 20.86% improvement in the task timeliness standard rate, a 21.90% reduction in distribution path lengths, and a 21.90% decrease in energy consumption. These improvements are particularly pronounced under burst scenarios, where sudden changes in demand or environmental conditions require rapid adaptation.
The implications for the energy sector are significant. As UAVs become more prevalent in logistics, the ability to dynamically and efficiently optimize routes can lead to substantial cost savings and improved service quality. In densely populated cities, where traffic congestion and airspace restrictions pose significant challenges, the MODDPG–NSGA2 algorithm could be a game-changer.
Beyond logistics, the proposed framework offers a novel perspective for applying multi-objective optimization algorithms in dynamic complex systems. Its adaptability and scalability make it applicable to a wide range of domains, from autonomous vehicle navigation to resource allocation in smart grids.
Published in the Journal of Engineering Science, this research represents a major step forward in addressing the multifaceted challenges of logistics for UAV cargo transportation. As technology continues to evolve, the MODDPG–NSGA2 algorithm serves as a foundation for future innovations in multi-objective optimization and intelligent decision-making systems. The work of Jian Deng and his team is not just a scientific breakthrough; it’s a beacon of hope for a more efficient, sustainable, and resilient future in logistics and beyond.